
services
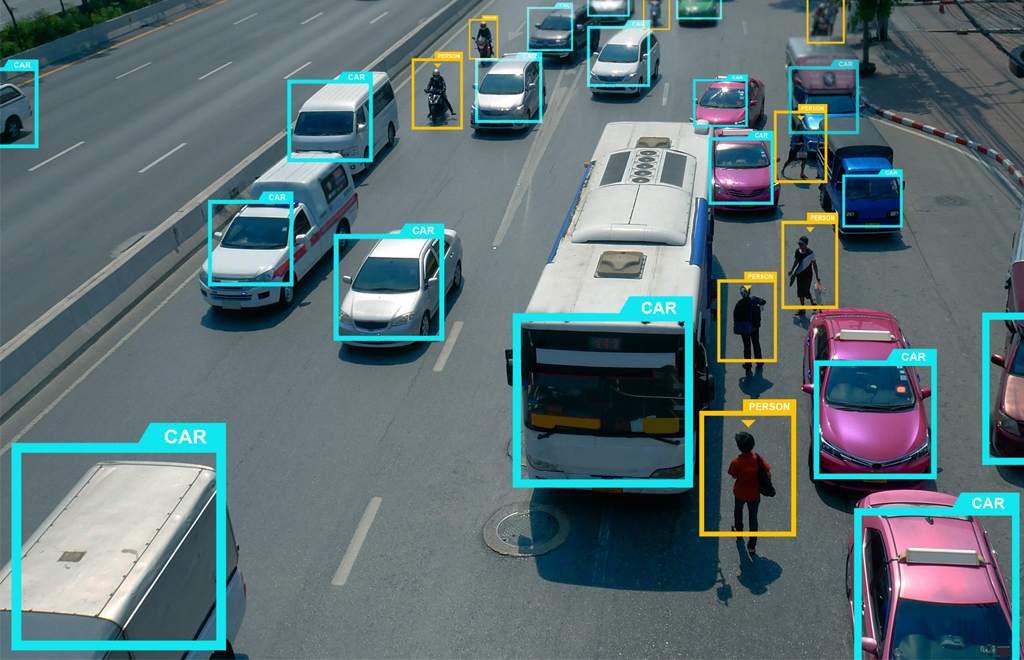
How annotation works?
Annotation is the process of tagging or classifying objects in each frame captured by an AV. This data then needs to be curated so that it is understood by the deep learning model, and relevant objects need to be identified and tagged or labeled.


A Layered Map
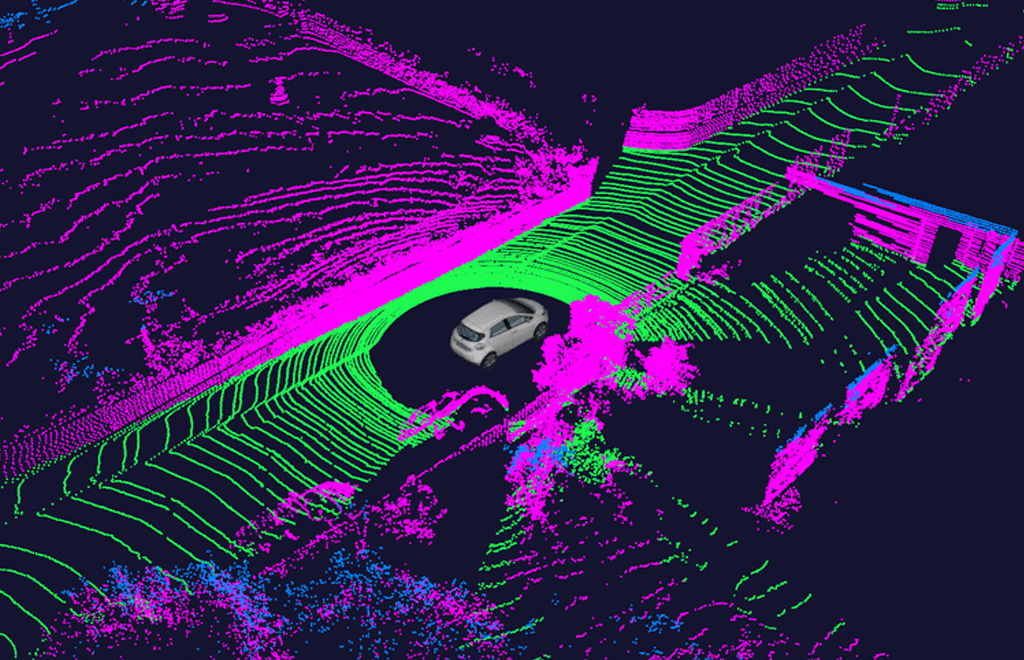
Geometric map layer
The geometric map layer contains 3D information of the world. This information is organized in very high detail to support precise calculations. Raw sensor data from lidar, various cameras, GPS, and IMUs is processed using simultaneous localization and mapping (SLAM) algorithms to first build a 3D view of the region explored by the mapping data collect run.
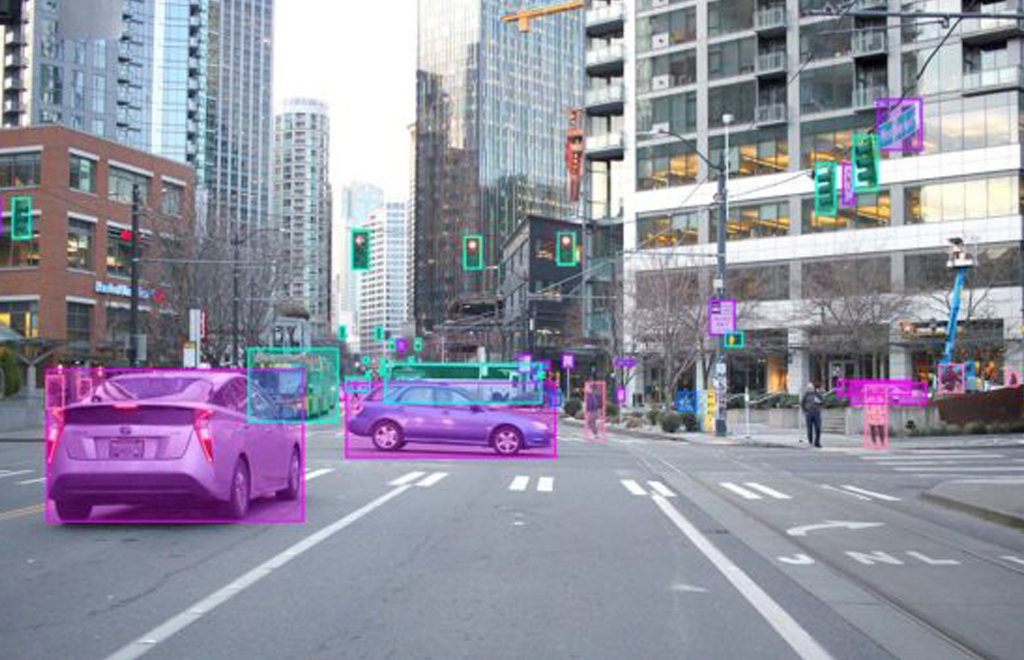
Semantic Map Layer
The semantic map layer builds on the geometric map layer by adding semantic objects. Semantic objects include various traffic 2D and 3D objects such as lane boundaries, intersections, crosswalks, parking spots, stop signs, traffic lights, etc. that are used for driving safely. These objects contain rich metadata associated with them such as speed limits and turn restrictions for lanes.
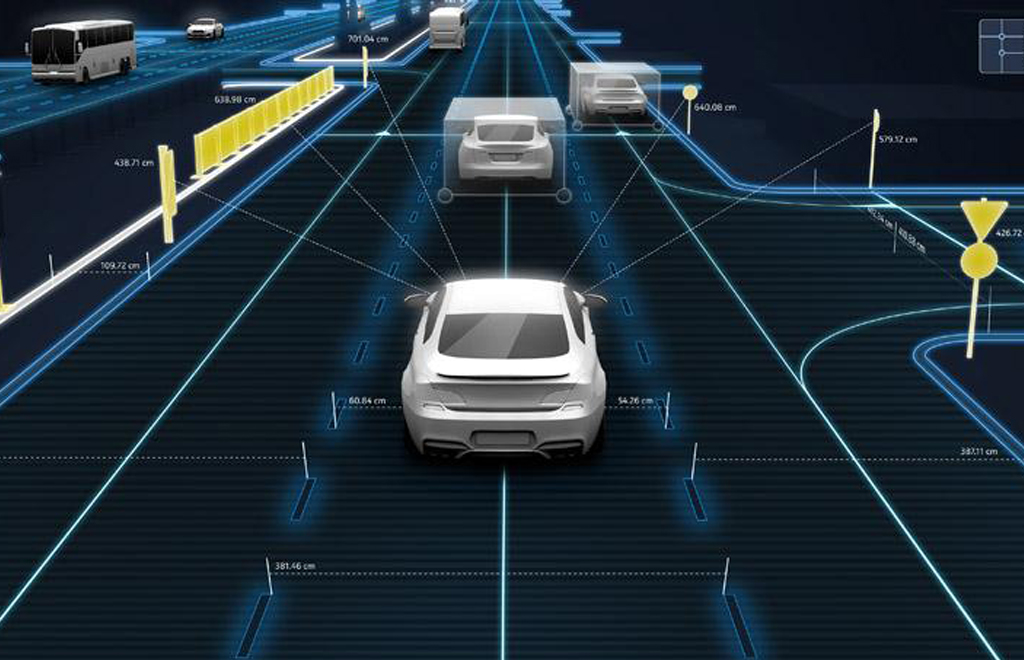
Real-time knowledge layer
The real-time layer is the top most layer in the map and is designed to be read/write capable. This is the only layer in the map designed to be updated while the map is in use by the AV serving a ride. It contains real-time traffic information such as observed speeds, congestion, newly discovered construction zones, etc. The real-time layer is designed to support gathering and sharing of real-time global information between a whole fleet of AVs.